
Selectief oogsten van asperges met autonome robot
AvL Motion is baanbrekend - met een machine voor het selectief oogsten van witte asperges, uitgerust met uiterst nauwkeurige sensoren en RFID- en veldbustechnologie van Turck
Het Nederlandse startup bedrijf AvL Motion heeft een machine op de markt gebracht voor het volledig autonoom selectief oogsten van witte asperges. Op zoek naar een ultrasone sensor voor hoogteregeling kwam het bedrijf de IO-Link compatibele RU40U van Turck tegen. Door de daaropvolgende samenwerking werd meer sensortechnologie in het voertuig geïntegreerd, waaronder miniatuur inductieve naderingsschakelaars, nauwkeurige encoders en LE550 lasersensoren van Banner Engineering en de robuuste Li500-Q25 lineaire positiesensor. AvL gebruikt ook de TN-Q14 RFID schrijf- / leeskop voor de identificatie van oogstmodules, terwijl de TBEN-S2-4IOL compacte I/O-module IO-Link signalen doorgeeft aan de PLC.
-turck-image.jpg)
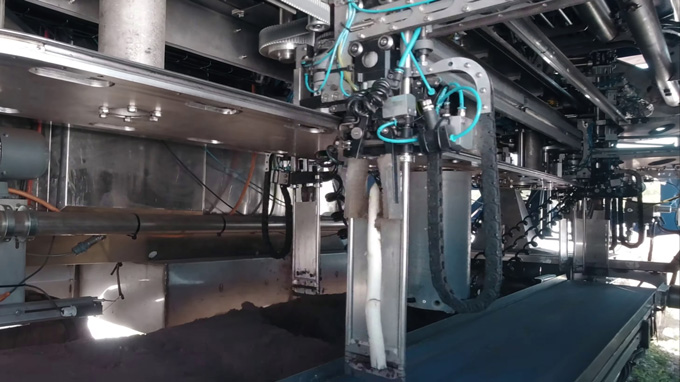
De AvL Compact S1560 trekt asperges automatisch uit de grond

Op de machine bevinden zich zes tot twaalf oogstmodules

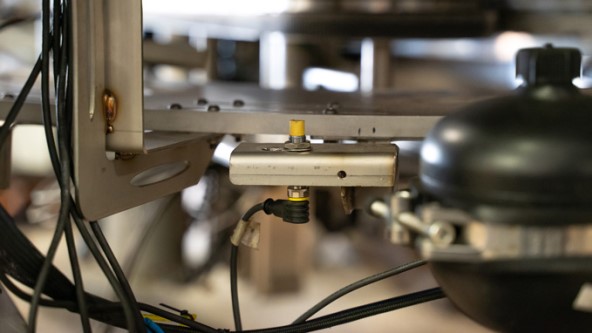
AvL oprichter Arno van Lankveld gebruikt IO-Link ultrasoonsensor RU40U van Turck

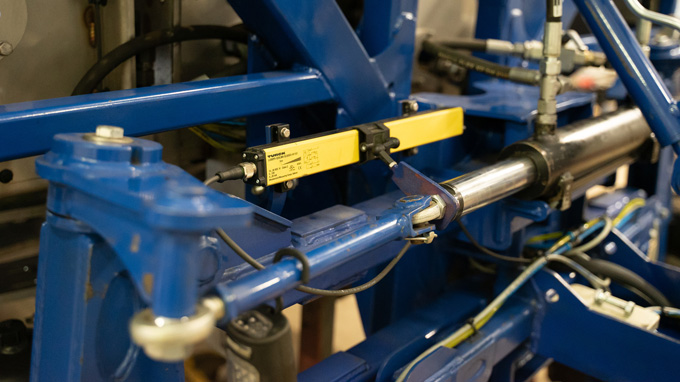
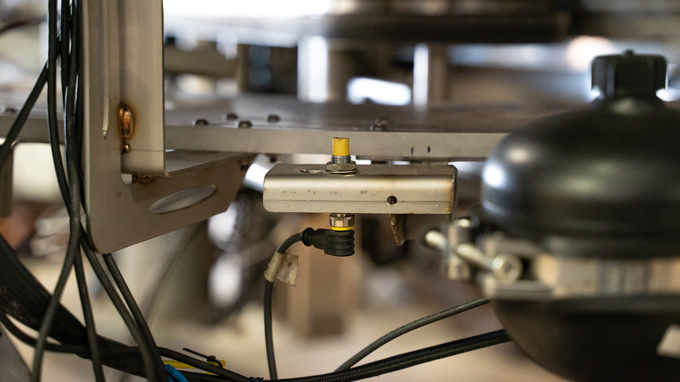
Dankzij het robuuste ontwerp kan de Li500-Q25 sensor ook buiten boven de vooras worden gemonteerd

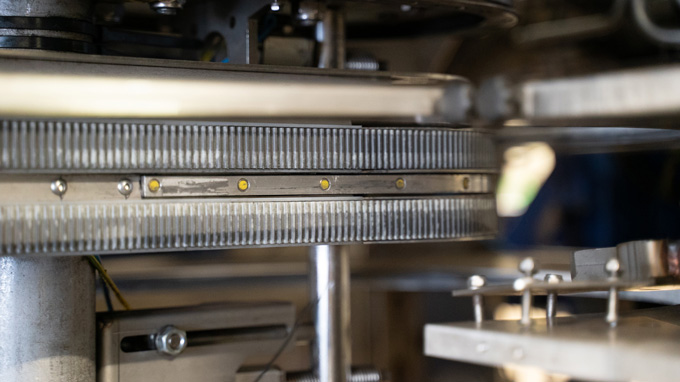
BI3-M08K miniatuursensoren in het buffergebied detecteren het aantal oogstcassettes
Wanneer een cassette de NI10U-M12 passeert, start de PLC de timer voor een oogstbewerking

Turck encoders melden op welke positie van de buffer momenteel een oogstmodule beschikbaar is

Op het bestuurdersplatform verpakt een arbeider de asperges en heeft hij de controle over de oogstmachine

De TBEN-S2-4IOL multiprotocol-module wordt gebruikt als interface tussen sensoren en PLC
-turck-thumbnail.jpg)








.jpg){kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Hoogteregeling met ultrasoonsensor met IO-Link
Om een dergelijk complex proces te automatiseren was behalve de pioniersgeest van de zeven medewerkers ook geschikte technologie nodig. Toen een ultrasoonsensor in de praktijk problemen veroorzaakte, vond elektrotechnicus en softwareontwikkelaar Jordi Hutjens een alternatieve oplossing met de RU40U van Turck. AvL Motion gebruikt nu twee van de ultrasoonsensoren met IO-Link om de afstand tussen het bed en het pneumatisch verstelbare binnenframe van de machine te meten. Ongeacht of het om een stoffige of natte ondergrond gaat, maakt de sensor een stabiele bepaling van de hoogte mogelijk, die gebruikers op een HMI kunnen opgeven. "Turck overtuigde ons met een zeer goede kwaliteit en een snelle levering. Daarom zijn we ook voor andere componenten bij ze gebleven", stelt Van Lankveld.
Optisch proces vervangt getraind oog
Het oogstproces van de AvL Compact S1560 is zeer dynamisch. Als de machine eenmaal is gepositioneerd en in beweging is gezet, is de eerste stap het scannen van het grondoppervlak. De hoofdbesturingseenheid krijgt van lasersensoren, aangevuld met een ander optisch proces, de informatie waar exact een aspergekop boven de grond uit komt. De details blijven een goed bewaakt geheim van de uitvinders; de enige eis is dat de bodem vrij is van onkruid. Ondertussen lopen een variabel aantal oogstmodules, momenteel 12, ongeveer 25 cm hoge, cassettes, rond langs een pad binnenin de robot. Ze zijn aangepast aan de rijsnelheid en beheersen het hele proces van steken, snijden en grijpen.
Fijnafstemming tussen target en oogstmodule
Om het oogstproces te verfijnen, heeft het controlesysteem niet alleen de coördinaten van de beoogde aspergestelen nodig, maar ook permanente informatie over de positie en de beweging van de modules. Dit begint met de vraag hoeveel cassettes op dat moment in de buffer in de parkeerstand staan, en bij detectie van een asperge in de rondloop worden gestuurd. AvL gebruikt hiervoor de kleine BI3-M08K inductieve sensoren. De oogstmodules worden nauwkeurig geïdentificeerd via RFID - met behulp van de HF-schrijf- / leeskop TN-Q14, die de individuele code van elke cassette leest.
De positionering wordt mede bepaald door roterende encoders. "De encoder draait mee in het buffergebied. Zo kunnen we zien we of een cassette zich bijvoorbeeld op millimeter 20 of 30 bevindt", legt Hutjens uit. En als de rondloop van een oogstmodule dan wordt gestart, passeert deze een uprox NI10U-M12-naderingsschakelaar, die de timer voor een oogstcyclus start in de PLC. Een dergelijke complexe voorbereiding is nodig om de beweging van de cassettes te synchroniseren als de machine op volle snelheid draait.
Omdat de asperges niet netjes achter elkaar in een rijtje groeien, kunnen de oogstmodules behalve rondlopen ook naar links en rechts bewegen. Dit gebeurt door middel van perslucht, en is daarom altijd met een paar tienden van een seconde vertraagd. Om ervoor te zorgen dat de cassettes precies op elkaar aansluiten, ontvangt de PLC informatie over de afstand tussen de start- en doelpositie van de modules, gemeten met LE550-lasersensoren van Turck’s opto-elektronische partner Banner Engineering.
Keren met de joystick
De bestuurder kan de snelheid en de hydrostatische besturing van de oogstmachine beïnvloeden via een externe besturingsmodule. Twee Turck-encoders meten de omwentelingen van de wielen; AvL lost de detectie van de wielposities op via een inductieve lineaire wegmeting. De positiegever van de LI500-Q25-sensor is hiervoor gekoppeld aan de zuiger van de stuurcilinder. Op deze manier berekent de hoofdbesturing de hoeken van beide wielen met slechts één waarde - en kan de bediener de machine gemakkelijk draaien met behulp van een joystick. In tegenstelling tot menig model van concurrenten, hoeft de boer de AvL Compact S1560 niet aan een trekker te hangen om dit te doen.
Extra informatie
- c04b_DOWNLOAD-Item 37617 [PDF, MB]
- Video (YouTube): De volledig autonome witte asperge oogstrobot
- In één oogopslag: Encoderportfolio voor vele industriële toepassingen
- Link naar het product: Ultrasoonsensor RU40U-M18E-LIU2PN8X2T-H1151
- Link naar het product: Inductieve sensor BI3-M08K-AP6X-V1131
- Link naar het product: Inductieve sensor NI10U-M12-AP6X-H1141
- Link naar het product: Inductive lineaire positiesensor LI500P0-Q25LM0-LIU5X3-H1151
- Link naar het product: Optosensor LE550IQ
- Link naar het product: Optosensor met IO-Link LE550KQ
- Link naar het product: HF-RFID schrijf-/leeskop TN-Q14-0.15-RS4.47T
- Link naar het product: Compacte multiprotocole I/O-module TBEN-S2-4IOL
- Download het volledige artikel – more12050e [PDF, 1,31 MB]
- Automobiel
- Kabel met geïntegreerde stroombewaking voorkomt ongewenst uitschakelen van transportsysteem
- Inductieve couplers zorgen voor nauwkeurige materiaaltoevoer
- Assemblage management met een directe MES-verbinding
- Body detectie in de autoproductie
- Betrouwbare skiddetectie in de autoproductie
- Foutloze JIS order picking voor bumpers
- Lasersensor detecteert glimmende cilinders in batterijproductie
- RFID Bus Mode verzekert kwaliteit van lithium-ion batterijen
- Niveaumeting in dompelcoatinginstallatie
- Niveauregeling in centraal smeersysteem
- Kwaliteitsborging op de lijmrobot
- Inclinosensor versnelt platformuitlijning
- Motorsturing met conditiebewaking
- IP67 Hybride module verwerkt veiligheidssignalen
- Gedecentraliseerde bewaking van koelstations met RFID
- Robotlascellen in een netwerk met Ethernet
- Bewaking van het koelcircuit op lasklemmen
- Stromingsbewaking in trommelwassers
- Press Shop - Plaatdiktemeting
- Conditiebewaking van motoren
- Cloud-gebaseerde niveaubewaking
- Press Shop - Werktuigidentificatie
- Body Shop - Detectie van lasmoeren
- Paint Shop - Identificatie van skids
- Final Assembly - Robotmontage
- Powertrain - Contactloze controle
- Oppervlaktebewaking voor robotcellen
- Detectie op Item-niveau met UHF RFID
- Controle van koelsmeermiddelen in werktuigmachines
- Regeling van de hydraulische druk in persinstallaties
- Meten van procesdruk op schaarliften
- Body Shop - Laspuntinspectie van auto's
- Body Shop - Handmatig laden van de lascel
- Eindassemblage - Opsporen zwarte onderdelen op zwarte deurpanelen
- Eindassemblage - Schuifdakherkenning
- Eindassemblage - Lange-afstanddetectie in de assemblage van auto's
- Detectie van een rubberen ring op het motorblok
- Detectie van de positie van onderdelen in het motorblok
- Detectie elektrische auto's aan laadpalen
- Voertuigdetectie in een self-service car wash
- SUCCESS STORIES
- Modulare installatie voor flexibele en efficiënte productie
- Lasersensor detecteert zwarte bumpers in assemblagecel
- Gedecentraliseerde veiligheidstechnologie voor modulaire productie
- Modulair transportsysteem
- RFID- en I/O-modules voor veilige gereedschapswissels
- RFID stuurt AGV in veringproductie
- Uitlaatdemperproductie uitgerust met IO-Link passieve verdelers
- Identificatie werkstukdrager in productie van autoventilatie-onderdelen
- Lasmoerdetectie
- Transparantie met RFID
- RFID in motorenproductie
- Bumperproductie met identificatie
- IP67-Blok-I/O-oplossingen in paint shop
- Sensoren voor lassen en assemblage
- Hoekopnemers voor assemblagesystemen
- Freeskopidentificatie met RFID
- Pick-to-licht verbetert cockpitmontage
- RFID-Identificatie van injectiesproeiers
- RFID in de body shop
- IO-Link vereenvoudigt productie versnellingsbak
- Chemie
- excom I/O-systeem zorgt voor veilige productie van waterstof
- Decentrale automatisering in Ex-zones
- RFID-controle van buisverbindingen in de Ex-zone
- Ruimtebesparende ethernet-signaalverbinding in de MSR-kamer
- Modulaire skids in de Ex-zone met Ethernet automatiseren
- Ex-scheiding in modulaire procesinstallaties
- Detectie van leidingen
- Gedecentraliseerde signaalverwerking
- Eenvoudig aansluiten van veldapparaten
- Signaalverwerking met systeem I/O in de sturingskast
- Signaalverwerking met interfacetechniek in de sturingskast
- Identificatie van slangaansluitingen
- Efficiënte bewaking van schakelkasten in het veld
- Klepstandbewaking
- Planning en assemblage van systeemoplossingen
- Success Stories
- Schakelkastbewaker voor de transmissie van conditiegegevens
- Detectie in realtime van niveau van silo's dankzij Sensor-to-Cloud
- Efficiënte koeling van industriële ovens
- I/O systeem Excom creëert plaats in de MSR-ruimte
- RFID voor stof-ex-zone 22
- Plantenidentificatie met RFID
- Remote I/O ipv punt-tot-punt in Ex-zone
- Excom Remote I/O op Yokagawa Centum vp
- Revamping met Remote I/O in harsfabriek
- Klepstanddetectie
- Flexibiliteit door veldbus
- Optimalisatie met Remote I/O
- Correcte positionering met RFID in de carbidproductie
- Compacte Ex-beveiliging
- Energie
- RFID-systeem identificeert zonneceldragers
- Decentraal I/O-systeem voor Ex-zones bij H2-tankstations.
- Decentrale I/O-oplossing in Ex-zone voor H2-tankstation
- I/O-module vereenvoudigt opstelling en mobiel gebruik van brandstofcel-testopstelling
- Naderingsschakelaar detecteert positie rotor
- IP67 I/O in kolenproductie
- UHF RFID identificeert middenspanningscellen
- Remote I/O in biogasinstallatie
- Food & Beverage
- RFID Tracking vermindert voedselverspilling bij ijsproductie
- Condition Monitoring sensor automatiseert klimaatregeling
- Conditiebewaking van schakelkasten
- Conditiebewaking in opslagruimtes
- Controle deegdikte in machines voor het uitrollen van deeg
- Identificatie van voedselcontainers
- Inspectie bokalen
- Klepstanddetectie
- Detectie van pijpfittings
- Identificatie van chocolademallen
- Success Stories
- Cloudgebaseerd onderhoud voor stoomgeneratoren
- RFID-ondersteuning maakt Track & Trace in voedselproductie mogelijk
- Betrouwbare lineaire positiedetectie in ex-zone 22
- Gedecentraliseerde controller-modules in vriescellen
- Track and Trace bij vleesproductie met RFID
- Contactloze encoder in aardappelenproductie
- UHF RFID in voedseldistributiecentrum
- RFID voor chocoladeproductie
- Decentrale I/O voor bakmachines
- Remote I/O voor brouwerijen
- RFID in autoclaven
- IP67 voedingsapparaten voor transportlijnen
- Flessendetectie met camera
- Logistiek
- Voorkomen van pakketopstoppingen in het logistieke centrum
- Hoogteregeling en 3D-ruimtelijke bewaking op autonome vorkheftrucks
- Decentrale sturing van conveyor modules
- Tracking van Big Bags met RFID
- Afstandsdetectie in containerkranen
- Toegangscontrole voor beschermde gebieden
- Decentrale muting van veiligheidslichtgordijnen
- Robuuste blok-I/O-modules sturen rollenbaanmodules aan
- Kwaliteitscontrole
- Snelle goederenidentificatie aan magazijnpoorten
- Item-niveau detectie met UHF RFID
- Preventief onderhoud op transportbanen
- Detectie van transportcontainers
- Niveaudetectie in flessen
- Identificatie van cryovaten
- Identificatie van mobiele containers met handheldapparaten
- Identificatie van voedselcontainers
- Tier 1 – Just-in-sequence bumperidentificatie
- Conditiebewaking in opslagruimten
- Botsbescherming op kranen
- Success Stories
- RFID : ROI bereikt na drie vermeden leveringsfouten
- Sensor-gebaseerde totaaloplossing zorgt voor betrouwbare aansturing AGV’s bij Proferro
- Efficiënte navigatie voor vrachtwagens in een beperkt manoeuvreergebied
- Duurzaam volgen van RTI's dankzij RFID
- RFID-oplossing voor foutloze materiaallogistiek
- RFID met HF bus-modus maakt opslag van zaden eenvoudiger
- Pick-to-light versnelt handmatige logistiek met meer dan 60 procent
- Pick-by-light oplossing vereenvoudigt assemblageprocessen
- Onbemande zelfbedieningswinkel door RFID op grote bouwwerf
- I/O en veiligheidsmodules verhogen de verwerkingscapaciteit in de intralogistiek
- Tracking van zendingen van grondstoffen
- RFID-gebaseerde tracking-oplossing voor het minimaliseren van laadfouten
- RFID-gebaseerde tracking van inkomende en uitgaande materialen
- Gedecentraliseerde UHF RFID oplossing
- Contactloze encoder in aardappelproductie
- IP67 PLC stuurt transportmodules in een koelhuis
- Snelheidscontrole via radarsensor QT50
- IP67 voedingen voor transportbanden
- Modulair transportsysteem
- RFID-oplossing voor magazijnen
- RFID stuurt AGV in veringproductie
- RFID identificeert farmaceutische producten
- UHF RFID in voedingsdistributiecenter
- Autonome parkeerhulp voor vrachtwagens
- Mobile Equipment
- Detectie van dieren en voorwerpen op de maaidorser
- Condition Monitoring Sensor automatiseert klimaatregeling
- Automatische hellingscompensatie
- Distributiekabels voor mobiele sproei-installaties
- Hoekmeting op een mobiele sproei-installatie
- Bewaking flow oogstproducten op maaidorser
- Positiebepaling van de giekhoek van een kraan
- Compartimentenverlichting op brandweerwagens
- 2-assige inclinatiemeting op een maaidorser
- Botsbescherming op kranen
- Success Stories
- RFID-oplossing met slimme vorkheftrucks in automobielproductie
- Veilig onderhoud op afstand van irrigatie- en drainagepompen
- Inclinometers en encoders helpen snelmontagekranen openvouwen
- Toegangscontrole met RFID-systeem en IO-Link
- Selectieve asperge oogstrobot
- Positiemeting met RFID en encoder
- Snelheidscontrole met QT50 radarsensor
- RFID stuurt AGV in veringproductie
- Robuuste multiprotocol I/O-modules op superjacht
- Slijtvaste encoders op zuigerbaggerschepen
- I/O-systeem voor voorkomen van stof
- Koeling schakelkast
- Snelle aansluittechniek
- Aansluittechniek voor extreme koude
- Remote I/O voor kranen
- Gewichtheffers buiten categorie
- Naderingsschakelaars beveiligen achtbanen
- Bouwen aan de toekomst
- Lineaire positiemeting bij pretparkattractie
- Stabiliteitscontrole brandweerwagens
- Hoekopnemer detecteert platform schaarlift
- Olie en gas
- Verpakking
- Decentrale pakketverificatie voor farmaceutische producten
- Identificatie van kleurenprintercartridges
- Betrouwbare werking van machines
- Inspectie bokalen
- Bewaking van doppen in vullijnen
- Bewaking van wisselprocessen
- Identificatie van testflessen
- Niveaumeting van gemalen koffie
- Niveaudetectie in flessen
- Detectie van transport van kratten
- Success Stories
- Farma
- End-to-End volgen van monsters met RFID
- RFID-controle van toevoerslangen in Ex-zone
- Gedecentraliseerde RFID-pakketverificatie
- Modulaire skids in de Ex-zone automatiseren met Ethernet
- Netwerken van farmaceutische skids met decentrale IO-oplossingen
- Ex-scheiding in modulaire procesinstallaties
- Decentrale aansturing van kleppen
- Positiebewaking van actuatoren
- Detectie van pijpfittings
- Remote I/O-signalen
- Ontwerp en constructie van Super Skids
- Eenvoudig aansluiten van veldapparaten
- Identificatie van cryovaten
- Identificatie van mobiele containers
- Identificatie van mobiele containers met behulp van handheld-apparaten
- Identificatie van slangaansluitingen voor tussenproducten
- Identificatie van slangaansluitingen in steriele omgevingen
- Identificatie van slangaansluitingen in Ex zone 1
- Identificatie van big bags en bioreactoren
- Identificatie van toepassingen voor éénmalig gebruik
- Success Stories
- Halfgeleiders
- Identificatie onderdeelmarkeringen
- Geïntegreerde schakelingen tellen
- Controle van barcodes
- Compacte veiligheidscontroller
- Lijmdetectie op printplaten
- Detailcontrole van mobiele elektronica-apparaten
- Inspectie van IC-chips in tapezakjes
- Positiecontrole van IC-chips
- Detectie van harde schijven
- Multiproduct lichtgeleid montagestation
- LED-statusweergave in de productie van halfgeleiders
- Beveliging kleinere bedienings- en toegangspunten
- Success Stories
Select Country
Turck worldwide